Mailroom workers pick up mail and parcels from different stations and deliver them to various recipients. They know that some envelopes are time-sensitive so they use their knowledge to plan routes with the shortest possible delivery time.
This mail delivery puzzle can be mathematically addressed by using techniques from operations research, a discipline that deals with applying analytical models to improve decision-making and system efficiency. The mathematical science behind operations research is also highly applicable to the process modeling and management of robotics, industrial automation, and material handling systems.
NVIDIA cuOpt is an operations research optimization API to help you create complex, real-time fleet routing. These APIs can be used to solve complex routing problems with multiple constraints and deliver new capabilities—like dynamic rerouting, job scheduling, and robotic route planning—while using subsecond solver response time.
The NVIDIA cuOpt for Isaac Sim extension is a deployment of the NVIDIA cuOpt engine integrated directly with the NVIDIA Isaac Sim robotics simulation environment, an NVIDIA Omniverse application.
Route optimization problems
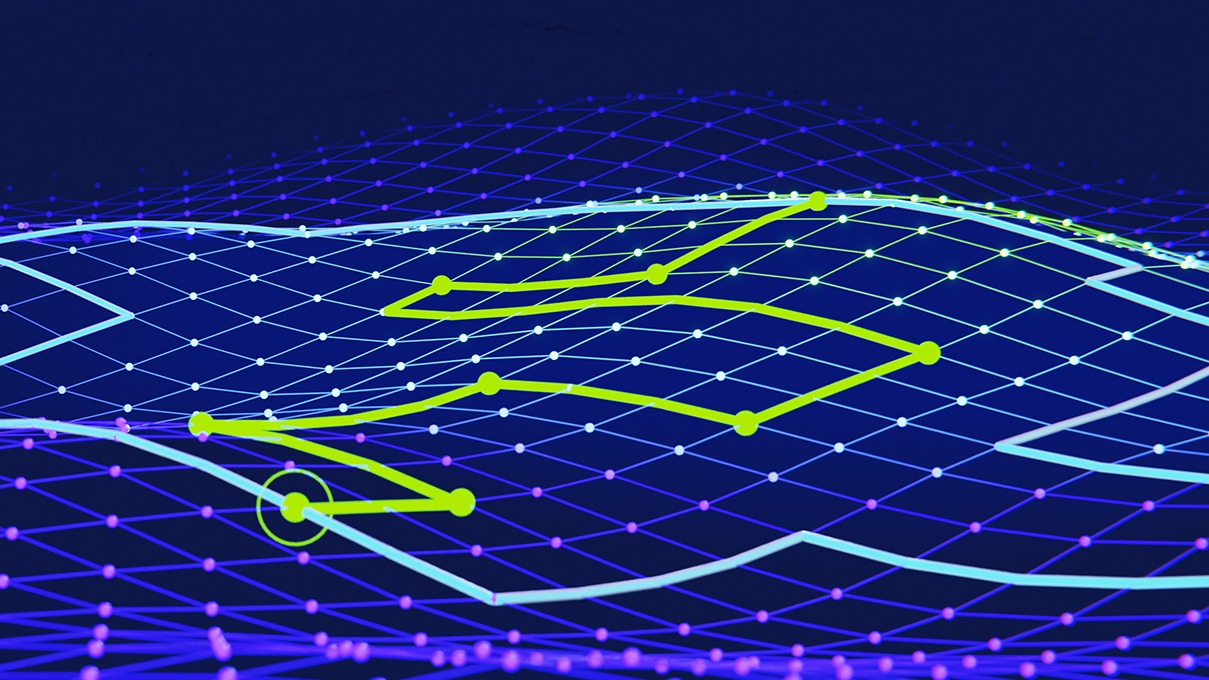
Logistics professionals work on real-time route optimization problems. such as the traveling salesman problem (TSP), vehicle routing problem (VRP), and pickup and delivery problem (PDP).
VRP and PDP are derived from the more academic TSP, which is one of the most studied problems in operations research. It asks the following question: “given a list of destinations and distances between each pair of destinations, what is the shortest possible route that visits each destination exactly once and returns to the original location?”
The TSP has several applications in planning and logistics and its direct usage can save significant material movement time within a warehouse, hotel, hospital, or manufacturing facility that requires route optimization between pickup and drop-off points.
Using cuOpt in planning and operation
Robotics companies use cuOpt both in the planning stages of a robot deployment and during continuous operation. For example, during a project planning phase, the facility’s process layout informs the system planners of throughput requirements for a successful project ROI.
For continued operation, while the robot fleet operates inside a facility, the NVIDIA cuOpt for Isaac Sim extension enables dynamic rerouting according to system variables such as obstacles, traffic, peaks in throughput demand, varying truck arrival or departure times, or the battery charge level in the robot itself.
In the past, companies designed their material handling and routing processes by using an offline, lower-fidelity, digital twin called a discrete event simulator. For the responsive robot deployments of the future, such as robots-as-a-service (RaaS), NVIDIA cuOpt for Isaac Sim operates as a real-time problem solver. It interfaces directly with robot deployment environments for direct integration and responsiveness to system changes.
According to McKinsey, “Executives are investing to digitize and automate nearly all functions. More than 60 percent of our respondents reported that they have either implemented or are scaling up digital and automation solutions.”
For example, companies that build mobile robots, robotic forklifts, or service delivery robots can model how their fleets move material with different timeliness than people or conveyors. To fully realize the systemic differences, an operation must analyze the entire material movement flow of their processes from an object’s origin location to one or more destinations.
A company deploying robots at scale can use the NVIDIA cuOpt for Isaac Sim extension to transform existing operations into robotic processes by following these steps:
- Robot readiness:
- Model an existing facility with NVIDIA Isaac Sim.
- Test material movement flow and its throughput requirements.
- Redesign of brownfield facilities:
- Model updated facility plans and routing.
- Test updated layouts with simulated robots.
- Real-time analytics and rerouting:
- Measure real-time system performance.
- Enable robots to reroute according to process variation.
Example: Manufacturing
Picture a manufacturing process where the downstream steps in a manufacturing facility rely on the timely delivery of parts. Suppose that these parts arrive late. In that case, those manufacturing machines starve, and the factory produces fewer products that day.
Inefficient route optimization readily serves as a bottleneck or constraint for the timely delivery of material. When a single process step is less efficient than other processes, it slows the entire flow of operations.
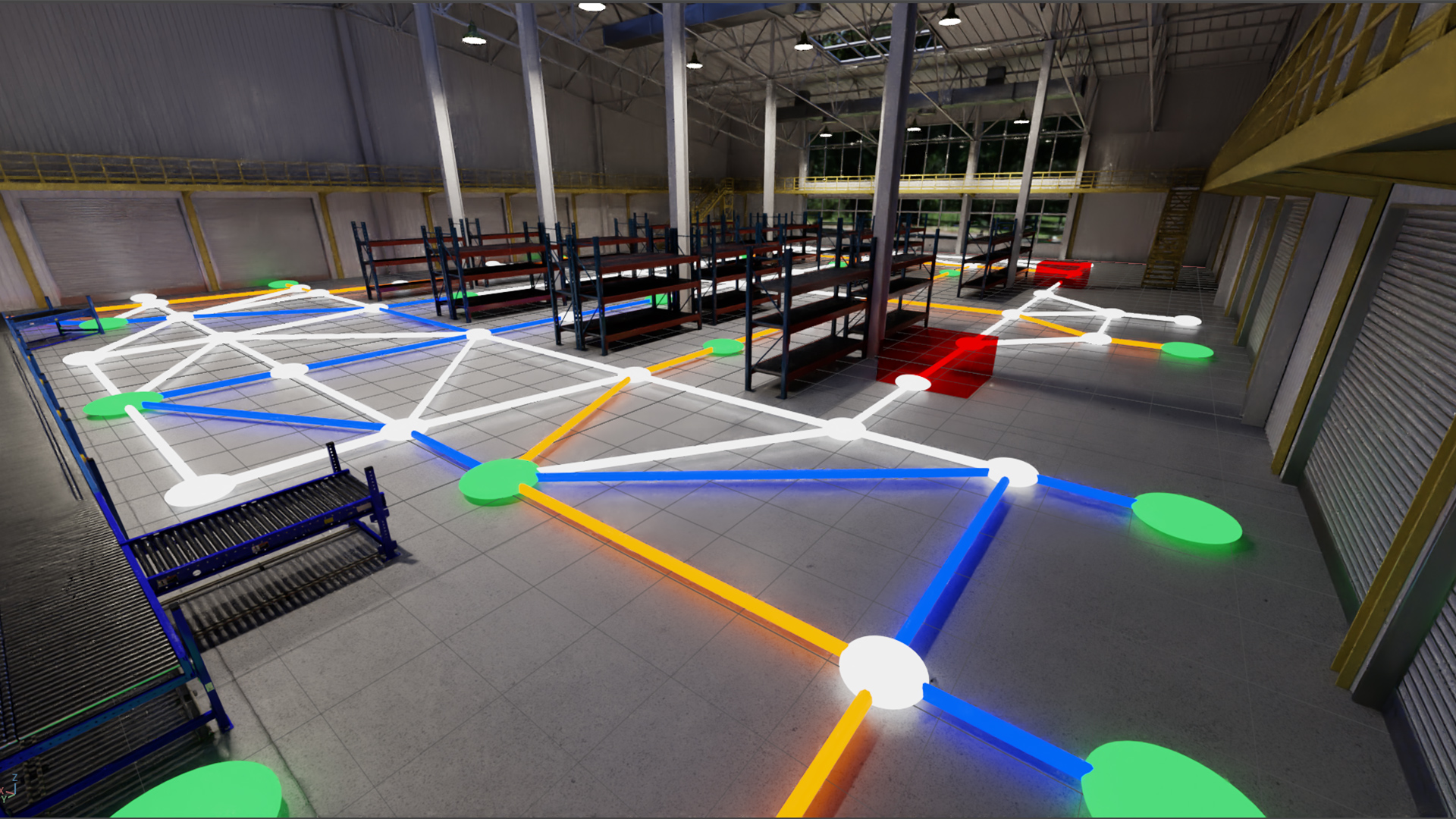
Example: Warehousing
In warehousing, floor obstacles or traffic can slow mobile robots, increasing the predicted transport times. These robots need dynamic rerouting that reacts to variables when the robot’s route is obscured. If the mobile robot gets stuck or slows down, then it acts as a bottleneck or constraint for the entire operation, so they need real-time responsiveness to obstructions.
A robot always works in the context of how the material moves within its entire system. When this robot movement is measured or predicted, more robust data streams are available to floor managers to determine how to manage the uptime of the entire process.
Optimizing routes for business-critical constraints
NVIDIA cuOpt uses flexible optimization solvers and a patent-pending parallel core engine that evaluates multiple solutions and mix-fleet combinations that deliver high-quality results.
The NVIDIA cuOpt for Isaac Sim extension enables teams to tap into the accelerated performance of NVIDIA. You can generate thousands of environments and configurations in a fraction of the time by providing optimized task assignments and routing solutions informed by a collision-based occupancy map.
You can easily vary system parameters such as budget, speed of delivery, and robustness to identify the ideal layout for your operational needs. For example, the material handling and warehousing industry has specific needs for optimization and efficiency in the following processes:
- Improve pick path optimizations
- Increase warehouse capacity
- Improve safety and working conditions
- Maximize storage density
- Improve order fulfillment quality rates
- Plan for multi-flow material movement
- Respond to daily changes in material inputs and bottlenecks
Making the right operational decisions for a process is key to maximizing output while minimizing upfront and ongoing costs. With the NVIDIA cuOpt for Isaac Sim extension, robot fleets can make dynamic, data-driven decisions at any point during the layout and operation of a facility. Robotics companies and users gain an advantage in system redesign, process efficiency, and being able to take measurable action in real time.

Getting started
To begin using the NVIDIA cuOpt for Isaac Sim extension, use the following resources:
- Download NVIDIA Isaac Sim
- See the NVIDIA cuOpt for Isaac Sim demo GitHub repository
- Ramp up your skills with a DLI course, Introduction to Robotic Simulations with Isaac Sim